
The retraction system will require power and 2 way communication with the Spoke Wheel.
For short duration use the 12v power can be supplied by batteries mounted as close as possible to the center of the wheel. An array of small solar panels could charge the batteries from frame mounted lights.
The data transmission could be either RF or IR. There is likely to be a great deal of RF interference from the Rotor drive system. The choice seems to be IR.
The Picaxe micros have an "irin" and an "irout" command, so appear an obvious choice.
For short duration use the 12v power can be supplied by batteries mounted as close as possible to the center of the wheel. An array of small solar panels could charge the batteries from frame mounted lights.
The data transmission could be either RF or IR. There is likely to be a great deal of RF interference from the Rotor drive system. The choice seems to be IR.
The Picaxe micros have an "irin" and an "irout" command, so appear an obvious choice.
The micro modulates the output at 38k and IR receiver ICs at this frequency are cheap. The main problem seems to be the rotating and rapidly changing line of sight for the transmitter and receiver.
I think it can be done with several sensors connected together, but in a vernier fashion. The frame would have 7 sensor positions, and the wheel 9 positions.
I think it can be done with several sensors connected together, but in a vernier fashion. The frame would have 7 sensor positions, and the wheel 9 positions.

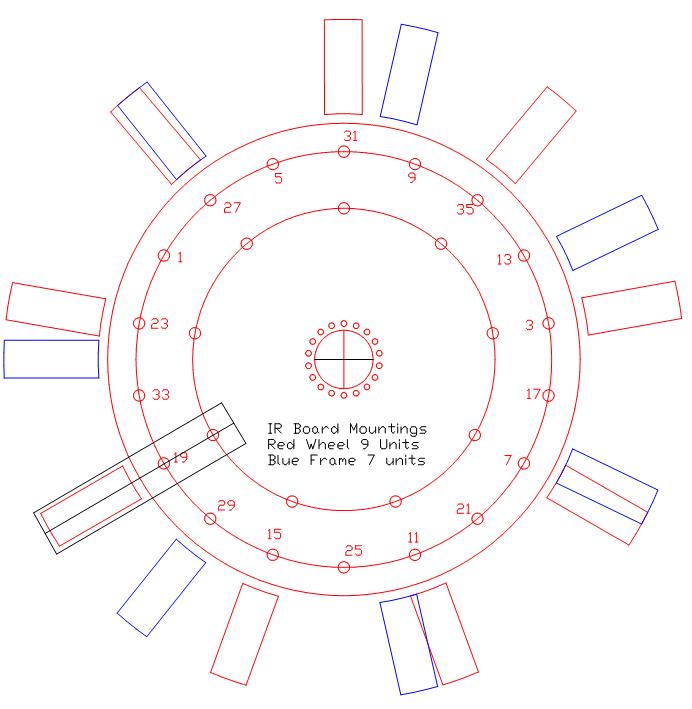
If the PCBs are mounted as shown there are always going to be 3 boards in reasonably close alignment. The vertical displacement would be about 100mm. The transmitting power would need to be low.
