
To have any chance of successfully building a working machine I have always considered that the rotor should be magnetically levitating within the machine
A machine of large diameter would be very difficult to construct using the methods I am using to assemble my 2500mm model. The levitating rings are not easy to get to rotate dynamically, and as at Sep 2016 I still have not been successful using retractable guide wheels. There is a lot of rotor bounce and friction.
Utilizing a central hub and spokes would hold the levitating rotor in its correct position, but the room taken up by these components would leave diminished space for occupants.
The spokes would not be connected directly to the rotor. Retractable guide wheels would still be used, but these would be mounted on the outer circumference of the wheel. At startup these wheels would be in firm contact with the inner circumference of the rotor. When a suitable combined rotor/spoke wheel velocity is reached, the guide wheels are retracted. Independent power and controls would be mounted on the wheel, which in normal operation would be stationary.
A machine with rotors of say 20 meters diameter could accommodate all the required components in a central floor cavity. A ceiling height in the center of the machine above the floor could be 2400mm and almost the same on the lower floor area. This would create a machine with an overall height of about 6.5m and width of 22m. A more manageable machine with a maximum headroom of 1800mm would have dimensions of 11 meters diameter and height of 4.25 meters. A machine about 3 meters diameter may be sufficient
to determine if a moving rotor can be successfully dynamically levitated, and whether there is any weight loss.
Access between the top and bottom area could be by way of a central spiral stairway shaft structurally connecting the top, bottom, and floor together. This would also form part of the large diameter hub bearings required. Alternatively, access could be obtained between floors at the outer part of the wheel if the stationary spokes allow sufficient space, and a normal bearing arrangement could be used in the center.
All the features of the small machine would be included as I think they may all play their part. That is to say it would retain both the axial and radial rotor levitational magnets with their associated partners and holders. A tube built in for holding mercury would also be essential for balance, and for any other benefits which may arise. Perhaps a 50mm tube, but holding just enough for balance initially.
The initial part of startup should be relatively smooth with low friction. During retraction there should be little rotor/guide wheel bounce, as both parts will be rotating at or near the same speed. To stop the rotor it should be possible to fit fit Eddy Current brakes to the wheel. When activated the effect should be to slow the rotor and rotate the wheel until both have a similar speed. The guide wheels would then be extended, the speed of both components would become the same, and power could be cut to the rotor.
To restrict weight and cost it may be feasible to use just one wheel to start a dual rotor machine.
Unfortunately the frame design I am using, and the rotor drive magnets positioning, does not allow this system to be practically adapted to my current project.
Utilizing a central hub and spokes would hold the levitating rotor in its correct position, but the room taken up by these components would leave diminished space for occupants.
The spokes would not be connected directly to the rotor. Retractable guide wheels would still be used, but these would be mounted on the outer circumference of the wheel. At startup these wheels would be in firm contact with the inner circumference of the rotor. When a suitable combined rotor/spoke wheel velocity is reached, the guide wheels are retracted. Independent power and controls would be mounted on the wheel, which in normal operation would be stationary.
A machine with rotors of say 20 meters diameter could accommodate all the required components in a central floor cavity. A ceiling height in the center of the machine above the floor could be 2400mm and almost the same on the lower floor area. This would create a machine with an overall height of about 6.5m and width of 22m. A more manageable machine with a maximum headroom of 1800mm would have dimensions of 11 meters diameter and height of 4.25 meters. A machine about 3 meters diameter may be sufficient
to determine if a moving rotor can be successfully dynamically levitated, and whether there is any weight loss.
Access between the top and bottom area could be by way of a central spiral stairway shaft structurally connecting the top, bottom, and floor together. This would also form part of the large diameter hub bearings required. Alternatively, access could be obtained between floors at the outer part of the wheel if the stationary spokes allow sufficient space, and a normal bearing arrangement could be used in the center.
All the features of the small machine would be included as I think they may all play their part. That is to say it would retain both the axial and radial rotor levitational magnets with their associated partners and holders. A tube built in for holding mercury would also be essential for balance, and for any other benefits which may arise. Perhaps a 50mm tube, but holding just enough for balance initially.
The initial part of startup should be relatively smooth with low friction. During retraction there should be little rotor/guide wheel bounce, as both parts will be rotating at or near the same speed. To stop the rotor it should be possible to fit fit Eddy Current brakes to the wheel. When activated the effect should be to slow the rotor and rotate the wheel until both have a similar speed. The guide wheels would then be extended, the speed of both components would become the same, and power could be cut to the rotor.
To restrict weight and cost it may be feasible to use just one wheel to start a dual rotor machine.
Unfortunately the frame design I am using, and the rotor drive magnets positioning, does not allow this system to be practically adapted to my current project.
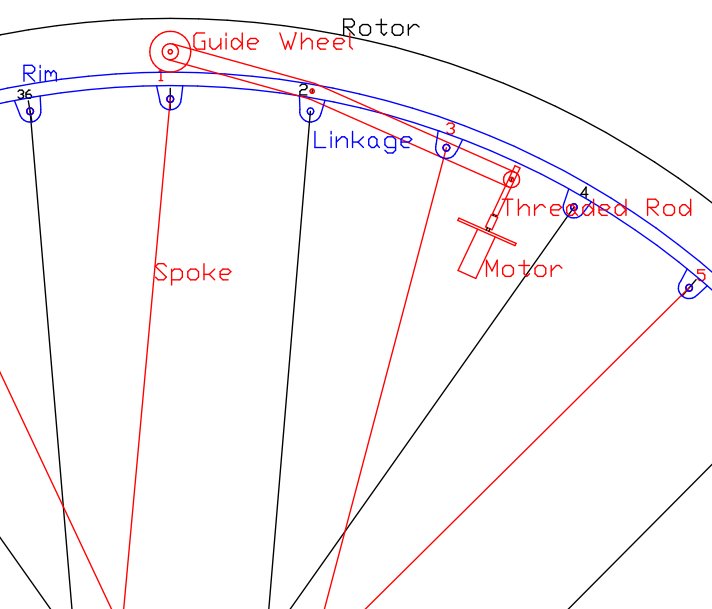
Guide wheel is fully retracted. Six to be used. 9 would fit.
Drive Magnets, Hall sensors and Drive Coils would be fitted to the upper horizontal surface of the top Rotor1, and the lower horizontal surface of the lower Rotor2. This could allow the rotors to be run close together, and also to use one spoke wheel to control the guide wheels for both rotors.
The theory could be tested initially without releasing the guide wheels, provided the Rotor is electrically isolated.